Open Platform of Social Robots based on Robotic Operating System - ROS
Social robots, as tools that have attracted researchers' attention in recent years, are expanding in various fields. However, acquiring or building a social robot for human-robot interaction research can be very costly. With this in mind, we have been working to develop an open source platform for developing social robots based on the robot operating system to minimize this limitation. This platform provides a ready-to-use integrated infrastructure, saving time, expertise requirements, manufacturing costs, etc. to achieve a social robot (with minimum requirements for human-robot interaction research).
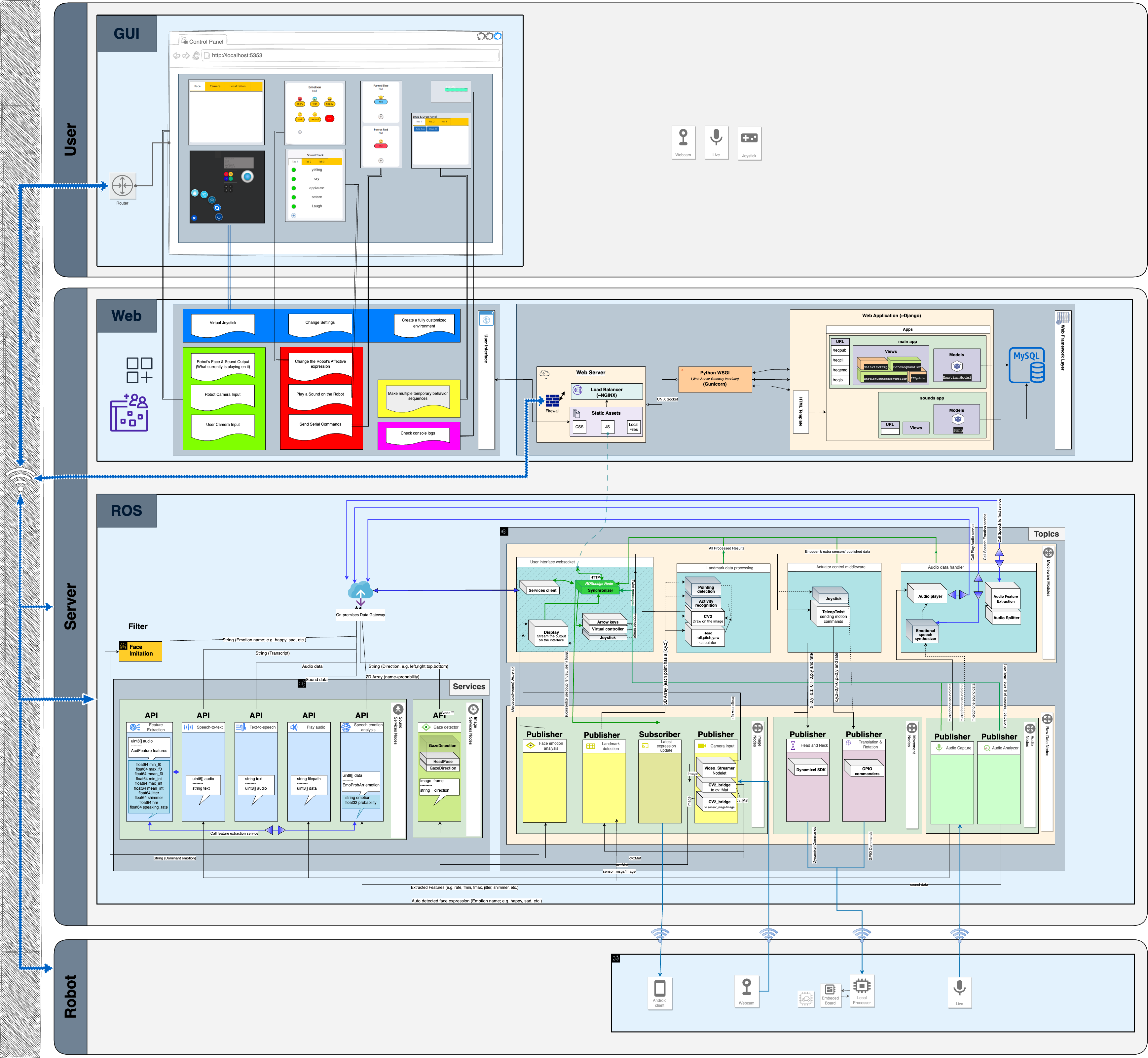
 This platform consists of several closely related layers. These layers include a web-based user interface layer, a ROS-based middleware processing layer, an Android application, and the robot hardware section. A simple user interface has been designed so that the user can modify it according to their needs and the robot's capabilities. This user interface is in constant communication with the Android application and middleware section, transferring user commands to them and displaying the necessary feedback to the user.
This platform consists of several closely related layers. These layers include a web-based user interface layer, a ROS-based middleware processing layer, an Android application, and the robot hardware section. A simple user interface has been designed so that the user can modify it according to their needs and the robot's capabilities. This user interface is in constant communication with the Android application and middleware section, transferring user commands to them and displaying the necessary feedback to the user.
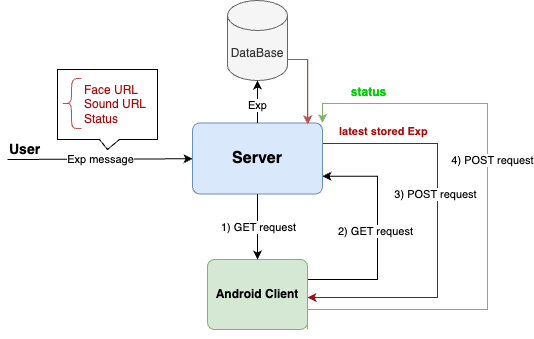
The Android application is designed as the face of the robot. This software receives user commands and middleware processing through ROS, and is responsible for expressing the robot's emotions by playing face video and voice accordingly.
 As mentioned earlier, the middleware layer is responsible for processing information and robot sensor inputs. For example, it receives images through the camera and performs image processing tasks on them. These processes are performed in several stages, which can include emotion detection, head and eye pose, and body pose of the person in front of the robot camera. Input from the robot microphone, etc. is also received, classified, processed and transferred to the user in the same way by this layer.
As mentioned earlier, the middleware layer is responsible for processing information and robot sensor inputs. For example, it receives images through the camera and performs image processing tasks on them. These processes are performed in several stages, which can include emotion detection, head and eye pose, and body pose of the person in front of the robot camera. Input from the robot microphone, etc. is also received, classified, processed and transferred to the user in the same way by this layer.
Finally, the robot hardware layer does not limit the robot we tested the platform on, and any researcher can run this platform on their own robot. Currently, this platform covers two types of motors (Dynamixel and DC motors). The test results show that we have achieved our goal of rapidly developing customizable social robots.

Members: Mahta Akhyani, Dr Hadi Moradi, Shahab Nikkhoo
Collaborating Centers:
Papers: