سیستم گنبد نورد برای عملیات پایدار تعمیرات، بازرسی و تمیزکاری

گنبدها یکی از جذاب ترین بناهای ملی-مذهبی- تاریخی ایران می باشند. زیبایی این گنبدها توجه بسیاری از گردشگران بین المللی را به خود جلب می کند. در نتیجه بررسی، تمیزکاری، تعمیر و نگهداری گنبدها از اهمیت خاصی برخوردار است. متأسفانه به دلیل دشواری انجام این عملیات توسط انسان و هزینه بر بودن آن عمدتاً این مسأله مغفول مانده و باعث تخریب تدریجی این آثار مهم می گردد. از سوی دیگر استفاده از روشهای متداول تعمیر و نگهداری گنبدها بسیار گران بوده و گاهی خود باعث تخریب بیشتر می شود. یکی از مراحل ابتدایی نگهداری گنبدها بررسی، تمیزکاری و برف روبی آنها می باشد.

هدف از طراحی ربات گنبد نورد، ساخت یک سیستم رباتیکی جهت بازرسی و تمیزکاری گنبدها می باشد. این ربات از قابلیت نصب سنسورهای پیشرفته برای بررسی سطح زیر گنبد برخوردار است. ربات با استفاده از دوربین نصب شده بر روی ربات این امکان را به کاربر می دهد که سطح گنبد را از زوایای مختلف بررسی نموده و در صورت نیاز دستور تعمیر را صادر کند.
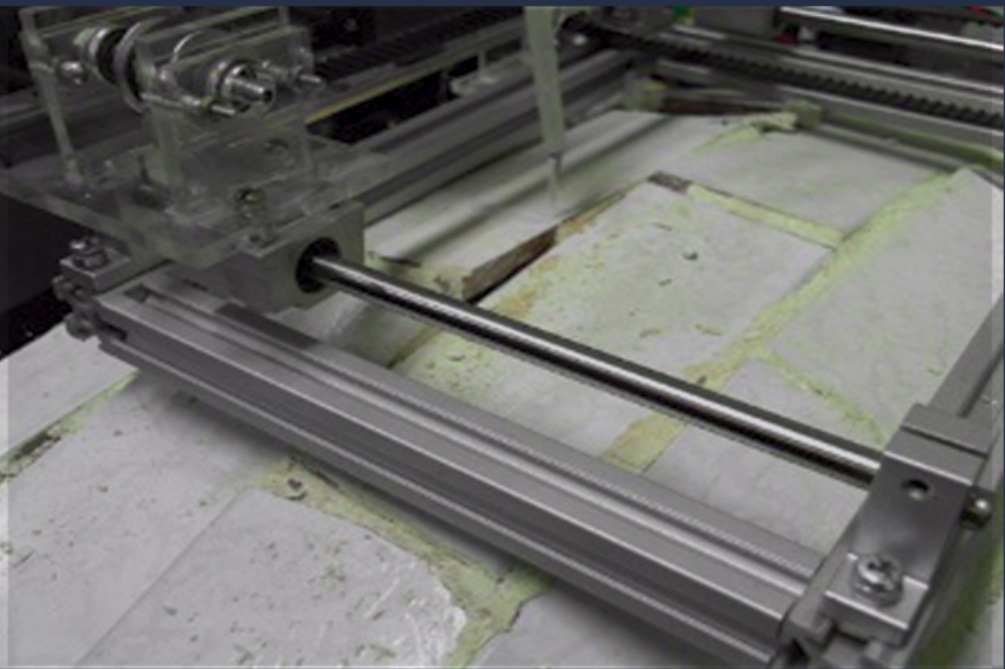
با گذشت زمان، عواملی مانند شرایط آب و هوا و تغییرات درجه حرارت باعث شکستگی کاشیهای روی سطح گنبد و همچنین بوجود آمدن درز و شکاف میان آن ها می شود. با استفاده از این ربات می توان به درزگیری و بندکشی بین کاشی های گنبد اقدام نمود. بدین گونه که سیستم تزریق با ترمیم درز و شکاف بین کاشیها از نفوذ آب و برف به آنها جلوگیری می کند.
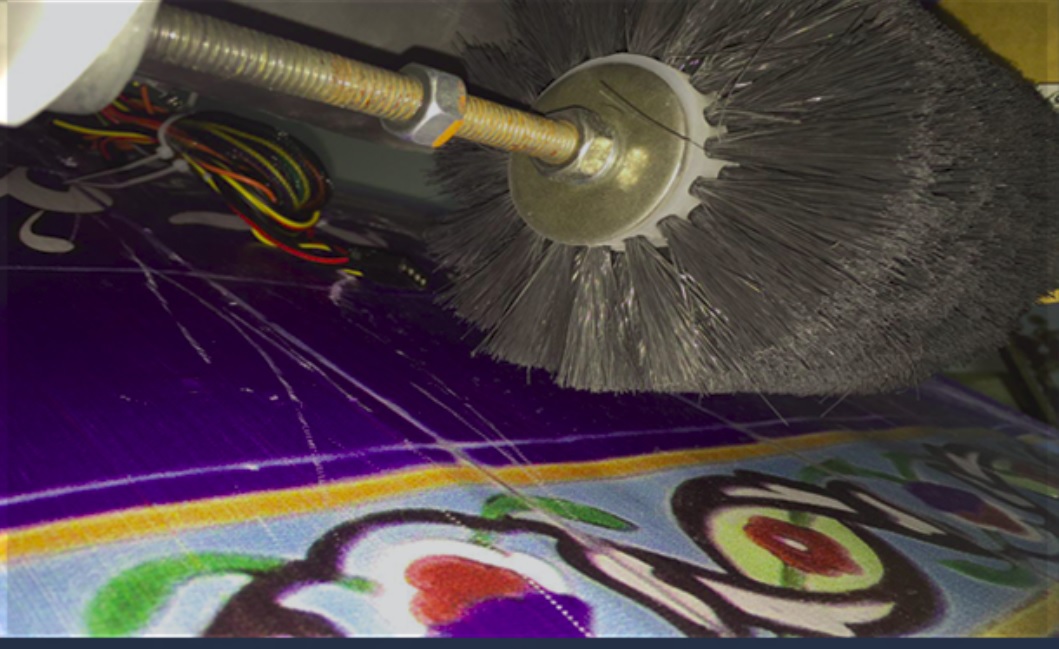
همچنین از طریق مجموعه حسگرها و توابع خود سطح گنبد را پیمایش کرده و با دستور کاربر نقاط مورد نیاز را تمیز می کند. این ربات با استفاده از آب و مواد شوینده که توسط کاربر فراهم شده به شستشوی سطح گنبد می پردازد. برس نصب شده در ربات امکان پاکسازی سطح گنبد از غبار را فراهم می آورد. همچنین می توان از ربات برای برف روبی سطح گنبد استفاده کرد.
این ربات از سه طریق قابل کنترل است:
1- کنترلر

2- صفحه تصویر: یک واسط کاربری طراحی شده که از طریق کامپیوتر قابل کنترل است.
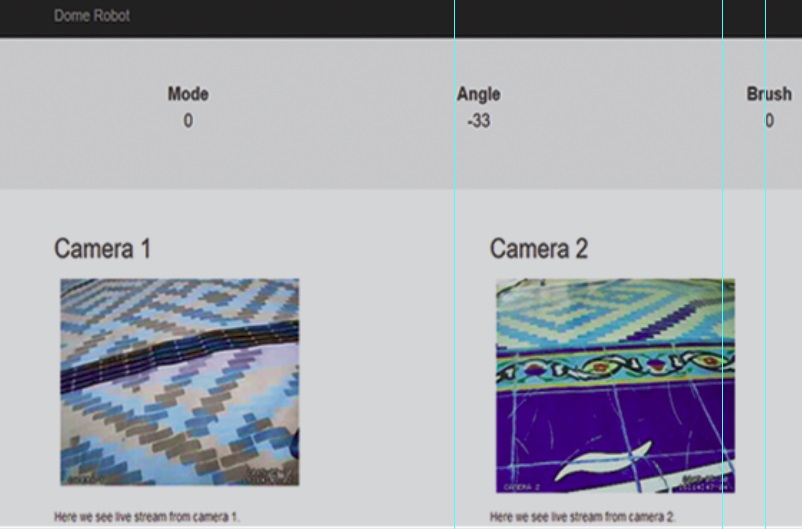
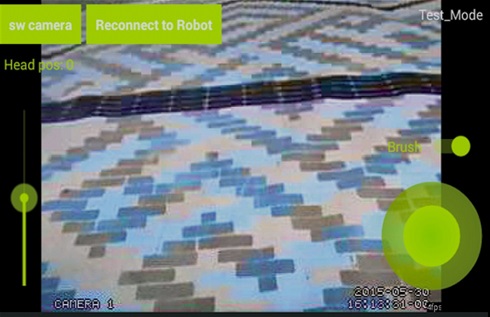
3- گوشی های هوشمند: این روش کنترل ربات را برای کاربر تسهیل می کند. همچنین امکان دیدن همزمان نمای سطح گنبد توسط دوربین های نصب شده در ربات را برای کاربر فراهم می نماید. در نتیجه متخصصین می توانند سطح گنبد را از راه دور بررسی کرده و بدون نیاز به حضور در محل عملیات لازم را انجام دهند.
تیم پروژه: هادی مرادی، بردیا زمانیان، محمدحسین صالحپور، کوروش نادری، اتابک نژادفرد، محمدحسن قیصریهها، ارژنگ احمدی، روژینا غنوی
مقالات مرتبط:
- MH Salehpour, HD Taghirad, H Moradi, “ Two PID-Based Controllers for a tethered Segway on Dome Shaped Structures”, 2018 6th RSI International Conference on Robotics and Mechatronics (IcRoM), pages: 577-582, Tehran, Iran, 2018.
- Mohammad Hossein Salehpour, Bardia Zamanian, Hadi Moradi, “The design, implementation, and stability analysis of a human-inspired dome-tethered robot”, Robotics and Mechatronics (ICRoM), 2014 Second RSI/ISM International Conference on, pp. 648-653, 15-17 oct 2014, Tehran , Iran.
- K Naderi, K Taheri, H Moradi, MN Ahmadabadi, “An evolutionary artificial potential field algorithm for stable operation of a multi-robot system on domes”, 2014 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), May 14-15,2014, Espinho, Portugal.
"درادامه روی فیلم کلیک کنید"