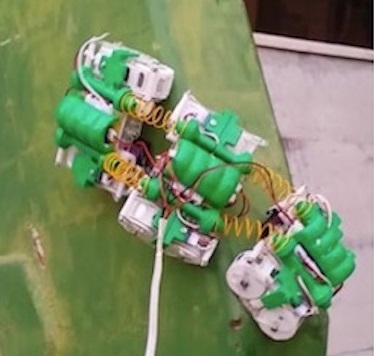
ربات کرم ابریشم برای بالارفتن و بررسی سازه های فلزی
یکی از راه حلهای موجود و مطلوب در مواجهه با دشواریهای زندگی فعلی بشر استفاده از رباتها است. رباتهایی که بتوانند با پیچیدگیهای موجود به خوبی کنار آمده و در جریان زندگی انسانها قرار گیرند. این ویژگی در بسیاری از رباتهای مفصلی حتی با درجات آزادی بالا وجود ندارد. از اینرو به سراغ انعطافپذیری در تولید رباتها میرویم.
رباتهای پیوستار به کمک انعطافی که در ساختار خود دارند میتوانند علاوه بر مانور بالا و حرکت در مسیرهای پیچیده، شرایط کم خطرتری برای حضور در محیط انسانها فراهم آورند. این نرمی میتواند به کمک مواد ارتجاعی، باد، فنر و ... ایجاد شود. این حوزه توجه زیادی را به خود جلب کرده و رباتهای پیوستار متعددی به منظور پژوهش و یا استفاده در محیطهای مشخص پیشنهاد شدهاند. اما چالش اصلی در استفاده از این رباتها بکارگیری مناسب عامل انعطافپذیری و کنترل آن است.
هدف ساخت چنین رباتی این است که از در دسترسترین سازوکارهای ارتجاعی، یعنی فنر، استفاده کرده و ربات پیوستار و پودمانی را مبتنی بر آن طراحی کنیم. در این راستا کمر نرمی را طراحی کرده و به تحلیل و کنترل آن پرداختیم بگونه ای که از آن میتوان در توسعهی یکی از پرکاربردترین و پر چالشترین حوزههای رباتیک یعنی رباتهای بالارونده استفاده نماییم؛ گرچه سازوکار نرمی مورد پژوهش وابسته به کاربرد نبوده و میتواند در ساخت انواع رباتها به کار گرفته شود.
در این راه به شناسایی عملکرد فنر هنگام اعمال نیروی عمود بر محور پرداخته و با بررسی انواع روشهای مدلسازی خمش، به دنبال بهترین روش برای مدلسازی فنر میگردیم. تا به این ترتیب بتوانیم با فعال کردن کمر فنری، راه حلی برای مانور بالای ربات ارائه دهیم، که در ادبیات رباتهای بالارونده به معنای عبور کردن از موانع متعدد، حرکت بر روی ساختار پیچیده و عبور از شکافهای محیط است. همچنین به دنبال رویکردی برای مدل کردن دینامیک نوسانی فنر، بسط فضای بررسی و در نهایت برنامهریزی ربات هستیم.
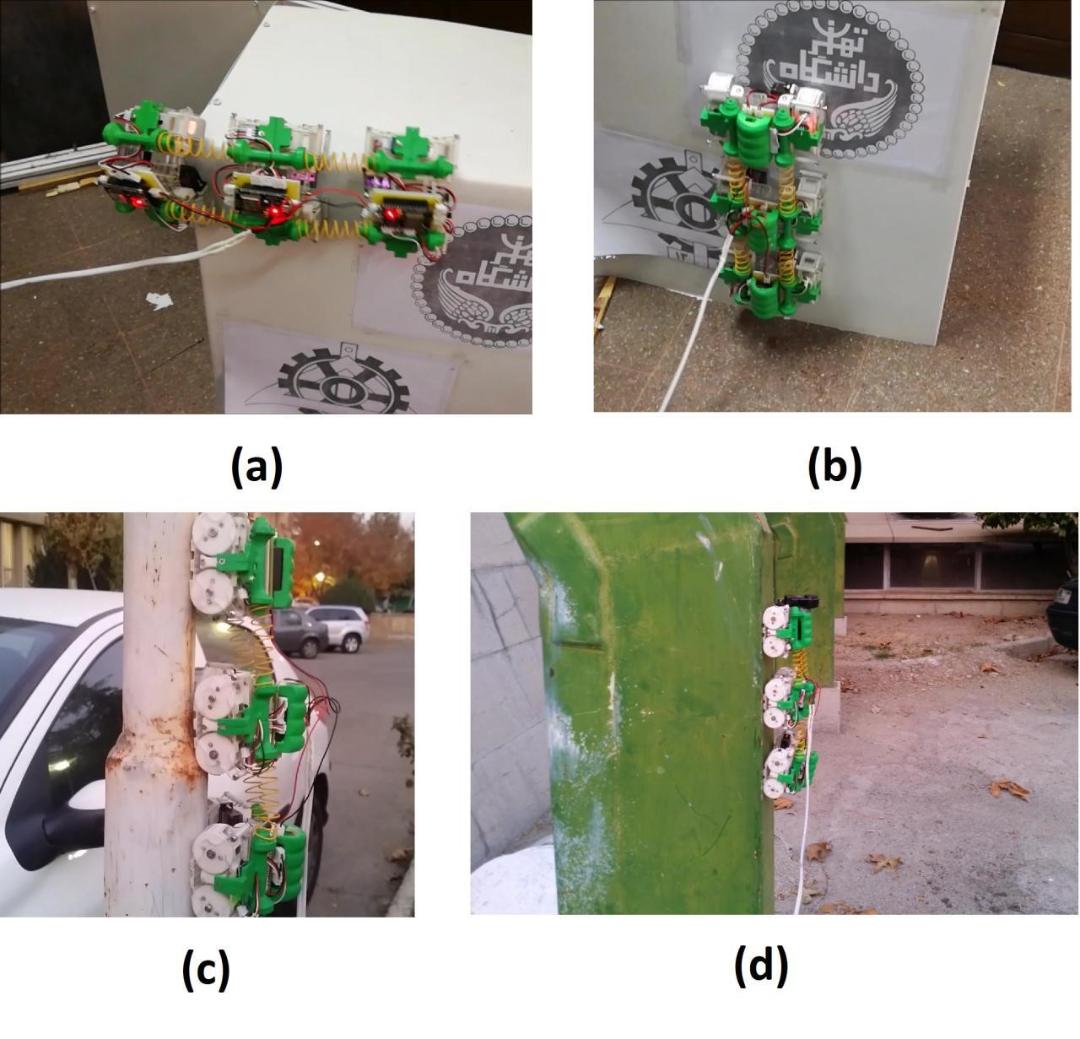
با در نظر داشتن آنچه شرح داده شد، در این پژوهش بر آن هستیم رباتی بسازیم که توانایی حرکت کردن و بالارفتن در محیطهای پیچیده را داشته و در مرحلهی اول بتواند عملیات بازرسی را به جای انسان انجام دهد. ساختار این ربات continuum بوده که بتواند از پس مسیرهای دشوار و موانع موجود به خوبی برآید. از جملهی این پیچیدگیها میتوان به وجود بخشهای غیر قابل دسترس در محیط و به عبارت دیگر دره، وجود سطوح در ارتفاعهای مختلف و به عبارت دیگر پله و وجود زاویههای بسته و شیبها منفی اشاره کرد. ربات باید بتواند تا رسیدن به هدف از سطح مختلف بالا رفته، آنها را بپیماید، موانع را رد کرده (شکافهای باریک) و یا آنها دور بزند.
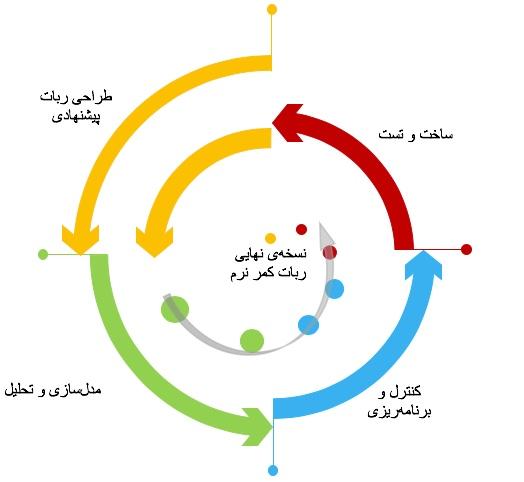
بنابراین لازم است در ابتدا ساختاری را برای ربات و بخشهای نرم آن پیشنهاد داده و سپس ربات را مدل، تحلیل و کنترل نماییم. برای انجام دادن هر یک از مراحل باید سعی شود روشهای موجود بررسی، ویژگیهای خوب آن حفظ و عیوب احتمالی آن رفع شود. همچنین هر یک از مراحل تاثیر مستقیم بر روی سایر مراحل دارد.
تیم پروژه: هادی مرادی، پریسا پرهامی، محمد حسین صالحپور، فرزام معصومی، مبینا متولیان
"در ادامه روی فیلم کلیک کنید"