ربات عروسکی
ربات عروسکی یک ربات کنترل از راه دور است که با کنترل دست انسان حرکت خواهد کرد.ربات عروسکی به منظور شبیه سازی حرکت عروسکهای نمایشی طراحی و ساخته شده است که دارای 4 سروو موتور میباشد. یک موتور برای چرخش کلی استراکچر، دو موتور برای شبیه سازی حرکت بازوها و یک موتور برای شبیه سازی حرکت سر.
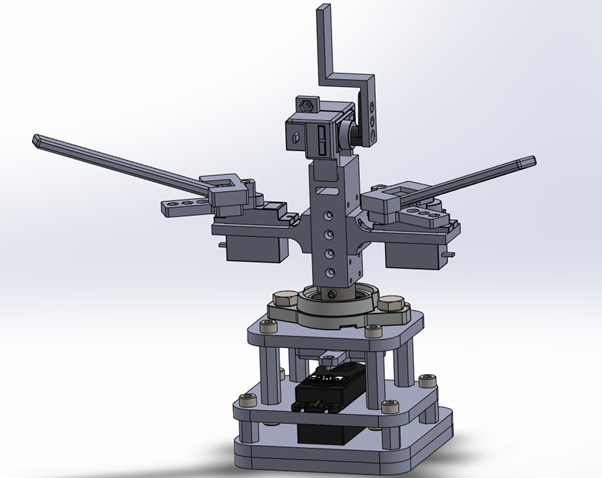
پس از اتمام استراکچر ربات، سروو موتورها کالیبره شدند تا در بازه حرکتیشان به بدنه برخورد نداشته باشند. از دو ماژول Arduino و NodeMCU میتوان برای دریافت سیگنال از دستکش و ارسال سیگنال PWM به سروو موتورها استفاده کرد که برنامه نویسی مربوط به هر کدام انجام شده است.
برای تست عملکرد ربات، کد پایتونی نوشته شده که دادههای رندم تولید میکند و این دادهها از طریق ارتباط سریالی به Arduino و وای فای به NodeMCU ارسال شده که میتوانید فیلم مربوط به عملکرد هر کدام را در پیوست مشاهده کنید.
در این پروژه، دانشجویان باید به طراحی/بهبود ربات عروسکی موجود در آزمایشگاه پرداخته و سیستم را ارتقاء دهند.
پیش نیاز لازم برای همکاری در این پروژه علاقه و تجربه در زمینه طراحی و ساخت سیستمهای مکانیکی، پردازش تصویر و یادگیری ماشین می باشد.
تیم پروژه: حامد حمزه، دکتر هادی مرادی
مراکز همکار:
مقالات مرتبط:
"درادامه روی فیلم کلیک کنید"